
ORIGINAL: AndrewJ
Here's some results from trials I ran last year.
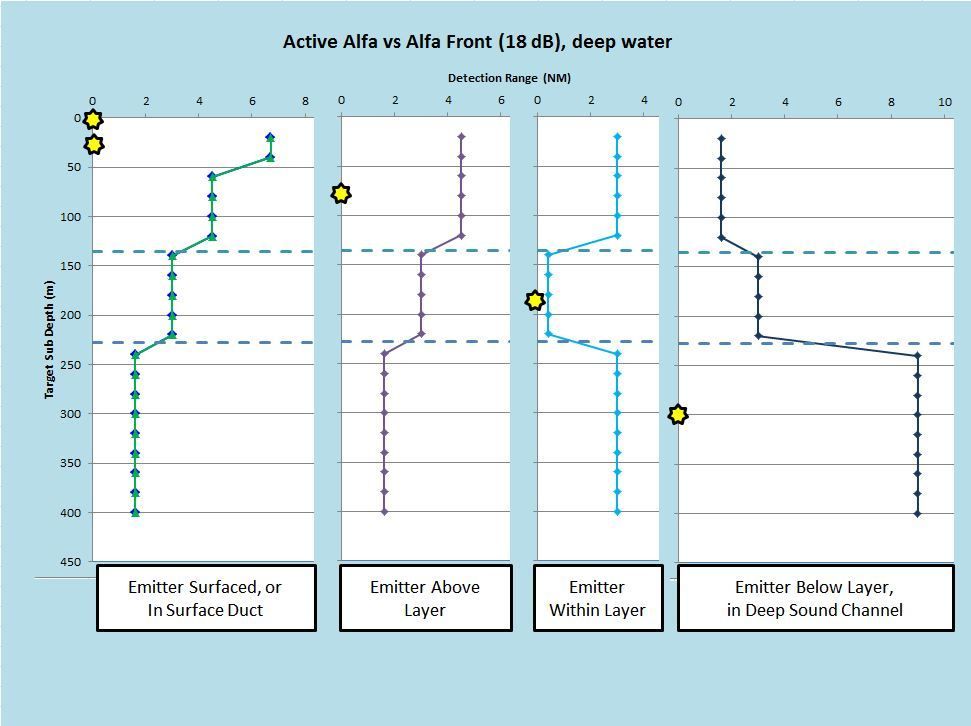
This graph shows the direct path performance of active sonars, where the emitter (which could be a submarine or a VDS) is at different depths (as shown by the yellow star). Within each subsection the range at which the target is detected is plotted against the target's depth. The layer is shown by the dashed blue horizontal lines.
The first thing you'll notice is that performance is broken up into four levels: the surface duct (above 50 m), shallow (below 50 m down to the layer), the layer itself, and the deep sound channel (below the layer). The detection range is the same within each level, regardless of depth of the emitter or target within it.
When the emitter is surfaced or is in the surface duct they get their longest range performance against targets that are also in the duct, and progressively shorter range detections against targets that are deeper. When the sonar drops below the surface duct it loses the surface duct bonus, but its performance against other targets stays the same. Descending into the layer you get terrible direct path performance to other targets that are also in the layer, but better performance against targets above and below the layer. And if you go down below the layer you get excellent performance against other deep targets, but poorer performance against targets above you.
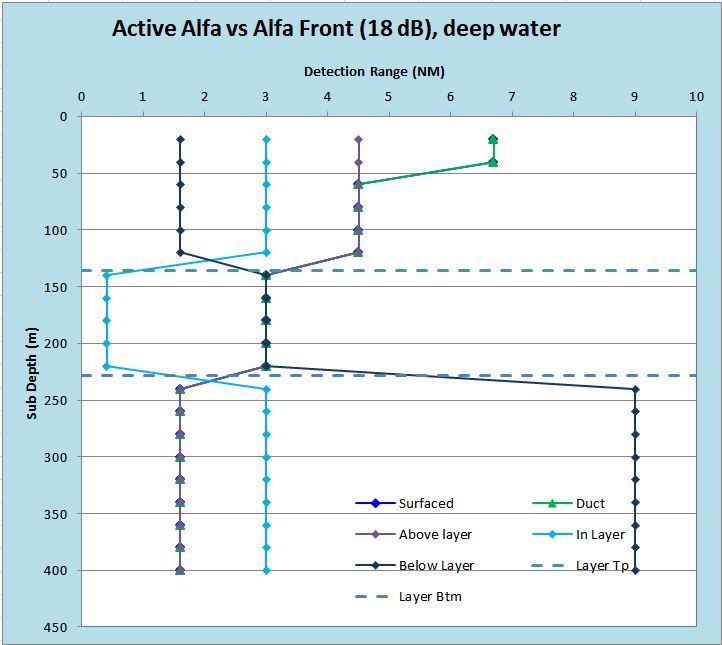
If you overlap the performance profiles you can see how they compare directly.
Keep an eye on that light blue line for sonars that are "In Layer". We'll look for it in the next graphs.
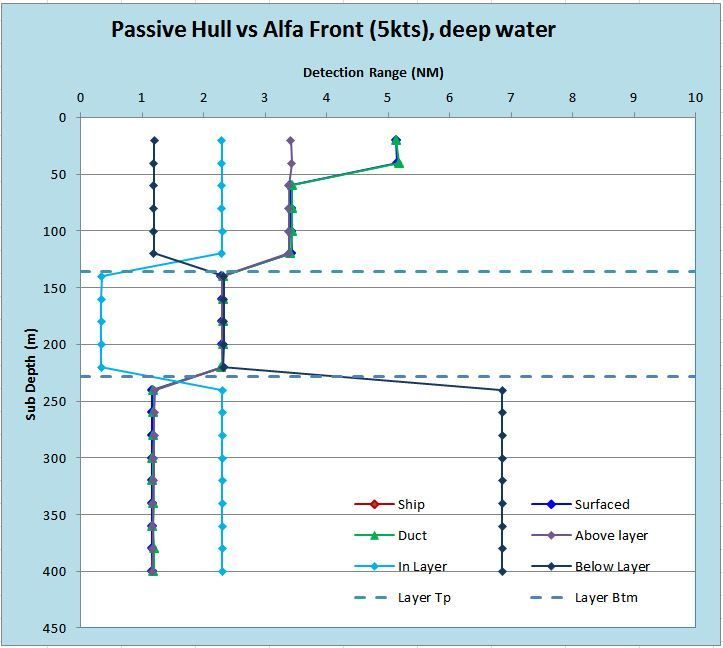
Here's an example of performance for a passive sonar.
Passive sonars have the same relative performance pattern. (As you would expect - sound paths don't care what caused the sound.) The rotten performance of sonars "In Layer" is still the same.
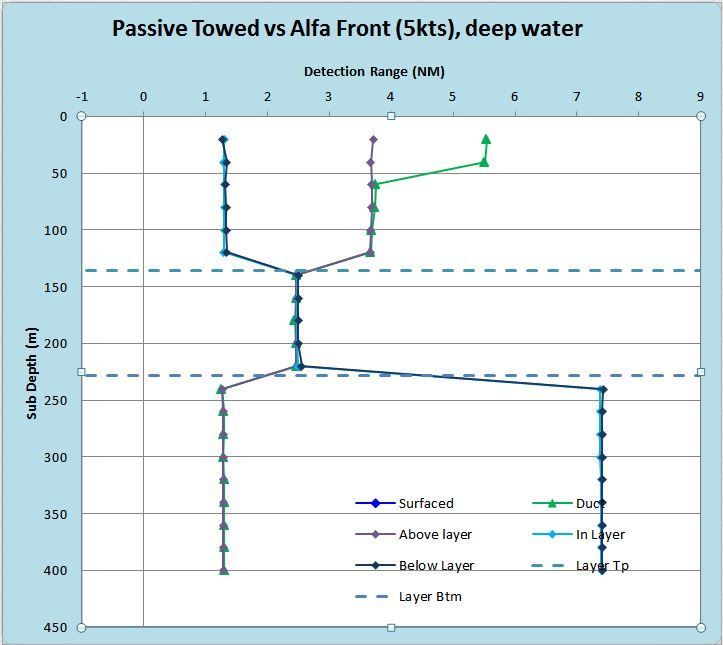
So what do we get when it comes to towed arrays? We get this.
Notice the same general performance pattern we've seen before, with one exception. The line for the "In Layer" performance now overlaps the line for the "Below Layer" performance. A submarine traveling in the layer has an array that acts as though it is below the layer. In all other cases the performance pattern for a towed array is the same as the performance pattern for a bow or hull sonar operating at the same level.
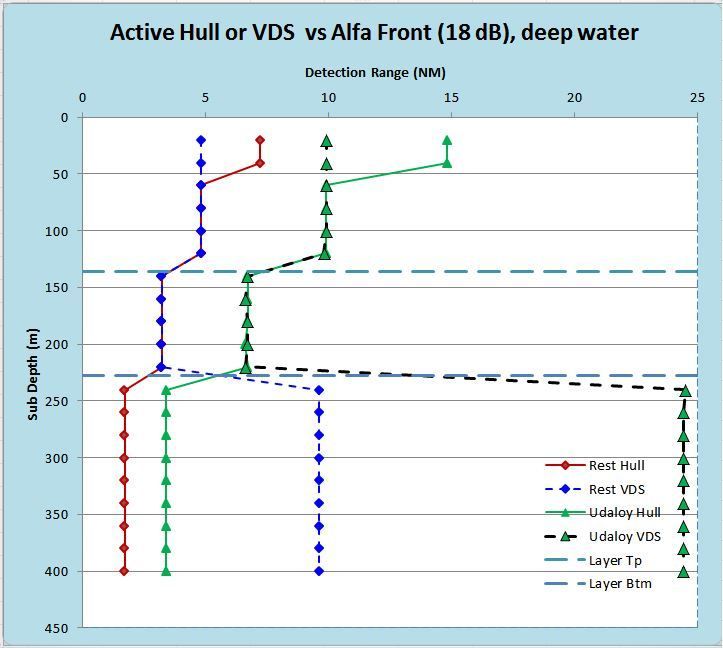
What about the VDS? They act differently. This graph shows the performance of two different ships (the Restigouche and the Udaloy) which have a VDS and a hull sonar.
The hull sonars operate like we've seen already. Good performance in the surface duct, and poorer performance as you get deeper and deeper. However, the VDS are performing as if they were below the layer (excellent performance in the deep sound channel) and as if they were above the layer (same performance as a hull sonar vs shallow or layer targets, but no surface duct bonus.) This abstraction represents the ability of the VDS to be moved above or below the layer as needed.
Note that this is all direct-path deep water sonar performance, and it does not get into the effects of shallow water or the target hugging the bottom (tremendous reduction in active sonar detection range), or the ability to make detections in the narrow CZ rings, when the water is deep enough for them to form.
performance in the surface duct, and po
Andrew, please can you update the pictures?
Thank you
Andy